![]()
項目簡介
1、項目名稱:盾構管片抹平機器人系統的研製與開發
項目狀態:正在進行
項目主要內容和成果:項目設計一款新型智能盾構管片抹平機器人♐️,去代替人工抹平🩸。機器人在控製位置的同時🧍🏻♀️,通過控製六個關節伺服電機的電流🚣🏻♂️😹,來讓末端執行器在抹平的過程中對圓弧管片表面始終施加均勻的抹平力🧏🏼♂️,從而提高抹平效率和質量🧘🏼♀️。
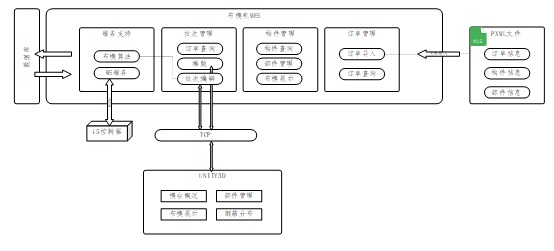
2.🤦🏼♀️、項目名稱:裝配式構件製造布模機計算機輔助工藝及編程系統
項目狀態:正在進行
項目主要內容和成果🏃🏻➡️:
“裝配式構件製造布模機計算機輔助工藝及編程系統”是建築行業預製件生產中的一個自動化解決方案。它可對BIM軟件導入的信息進行整理,管理訂單⚰️、構件和批次,自動生成布模程序並將布模結果3D化展示♙。以此大大提高預製構件的生產效率。

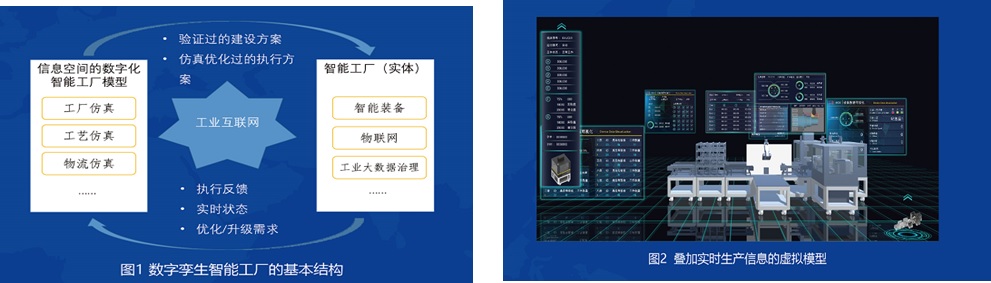
3、項目名稱:基於數字孿生的虛擬仿真優化技術
項目狀態:正在進行
項目內容和成果:
本項目將互聯網+和數字孿生技術融入該公司研發的智能製造系統中👧🏿,開發完成數字化孿生仿真模型及基於互聯網的定製信息系統,實現了網絡化定製下達生產訂單🪻,數字化孿生系統在線仿真模擬,真實展現生產場景,並可通過移動設備進行瀏覽和信息管理。
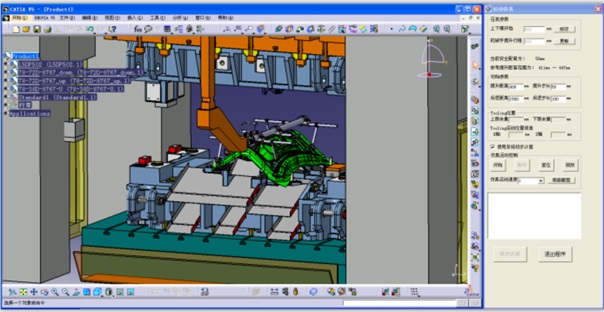
4、項目名稱:汽車沖壓線端拾器自動設計系統
項目狀態:已完成
項目主要內容和成果:
端拾器是用於沖壓線物料輸送的一種工裝🧝🏿♂️。由於各工位的沖壓型面不同,端拾器的形狀需根據型面進行調整,吸盤布局和連接桿的角度、位置都不相同。此外𓀙,端拾器必須具備良好的空間精度🫛,這就使得端拾器設計和組裝存在一定困難。
為了減少高速沖壓線上裝調端拾器造成的產能浪費,本研究分析了端拾器裝配過程的數學本質📴,引入機器人運動學Denavit-Hartenberg模型💎,基於反向運動學原理和虛擬裝配的空間約束關系🙋🏼♂️,建立了端拾器空間裝配的數學模型和位置調整策略🧙🏽♀️。在此基礎上,采用機器人運動學的分析方法🔢,對端拾器的自動化設計進行了研究🥷🏽,並采用Matlab求解了該運動學的逆解問題,最後通過對CATIA CAD系統的二次開發,建立了端拾器自動化設計系統🧒🏼。